With the continuous development of automation technology and wide application in various industries, the automation integration of the shipbuilding industry has also been greatly improved. In order to ensure the safe and reliable operation of the ship's power equipment, provide reliable and accurate real-time information for the operation of the management personnel, and reduce the misjudgment of human factors and the great waste of manpower, the ship cabin monitoring system based on CAN bus is designed. The system improves the real-time detection of the ship's power equipment parameters, and can display the important operating parameters and status of the equipment in real time. The paper was published. When it is detected that the running state of the device is faulty, the system will automatically alarm and record the fault; at the same time, adjust the operating parameters of the device to realize the control of the remote device.
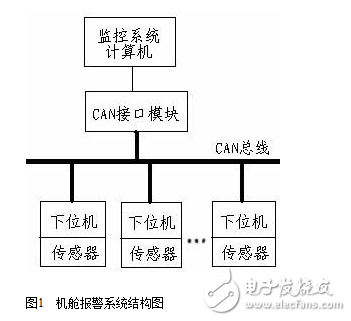
Controller Area Network CAN (Controller Area Network) is a serial data communication protocol proposed by Bosch. Its model structure includes physical layer, data link layer and application layer. The signal transmission medium is twisted pair, and the communication rate is up to 1Mbps. (40 m), the direct transmission distance is up to 10km (5Kbps), and each bus can be connected to up to 110 devices, which is especially suitable for networks with high real-time requirements. CAN bus is a serial communication protocol with strong anti-interference ability, which can be applied to occasions with large electromagnetic noise. This article is to use these characteristics of CAN bus technology, based on CAN bus technology to build a PC as the host computer, DSP system as the lower machine, using a variety of sensors on the ship's cabin and personnel, equipment and production safety is closely related Diesel engine speed, fuel inlet pressure, fuel inlet temperature, spindle temperature, oil inlet pressure, oil inlet temperature, oil outlet temperature, turbocharger oil inlet pressure, seawater cooling water pressure, The parameters related to fresh water cooling water inlet pressure and fresh water cooling water outlet temperature are monitored in real time, and timely and effective measures are taken according to the monitoring results. The overall structure of the system is shown in Figure 1.
The TMS320LF2812 digital signal processor integrates an enhanced CAN bus communication interface that is fully compatible with the CAN2.0B standard interface. It has 32 configurable receiving and sending mailboxes, and supports the timed mailing function of information. This interface can be used to build a highly reliable CAN bus control or detection network. The CAN controller of the TMS320LF2812 processor provides a complete CAN protocol for the CPU, reducing CPU overhead during communication. The CAN module structure is shown in Figure 2. The CAN module is mainly composed of a CAN protocol core and a message controller.
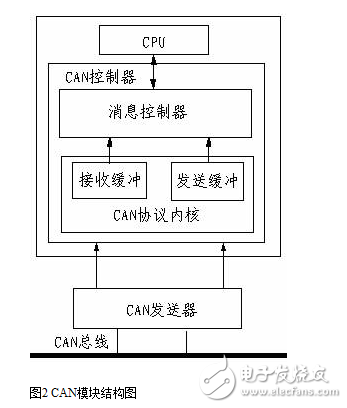
The CAN protocol core mainly performs two functions: decoding the message received on the CAN bus according to the CAN protocol, and transmitting the decoded message to the receiving buffer: another function of the CAN protocol core is to transmit information on the CAN bus according to the CAN protocol [ 1,2].
CAN communication module designThe communication module based on CAN bus has to undertake at least two aspects: one is to support on-site operation, including data acquisition, man-machine dialogue, etc. The other is to perform data interaction with the superior node as the underlying device of the network measurement and control system.
CAN communication module is mainly controlled by DSP and CANController, CAN transceiver, optical isolation circuit, storage device, I/O, etc. DSP and CAN bus control are the core parts.
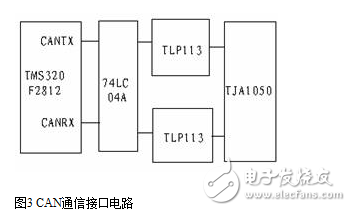
The TMS320F2812 has a CAN controller inside, which simplifies the peripheral design of the entire circuit and improves reliability. Considering the high rate and anti-interference of CAN bus data transmission, the CAN communication scheme is designed as follows: DSP CANRX and CANTX first match the level of 3.3 V and 5 V through 74LVC04A, and then pass the high-speed optical isolation TLP113 Connected with TJA1050 to realize the electrical isolation of the bus; TJA1050 is used as the driver to replace the previous 82C250. The advantage of TJA1050 is that it fully complies with the ISO 11898 standard; the high speed is up to 1Mbit/s; the electromagnetic anti-interference performance is good; the node that is not powered There is no disturbance to the bus; the output driver is temperature protected; at least 110 nodes can be connected. The digital power supply VCC and GND are obtained by isolation with a small power isolation module DC/DC, which increases the anti-interference ability of the communication. The CAN communication interface circuit is shown in Figure 3 [3].
The software design part is mainly a variety of data acquisition and control procedures, as well as CAN communication procedures [4]. The CAN communication program mainly includes an initialization subroutine, a transmission subroutine, a reception subroutine, and a bus exception processing subroutine.
The initialization program design mainly sets the communication parameters of the CAN controller. The initialization work mainly includes: working mode setting, basic parameter setting, accepting the mask register and accepting the mask register setting, etc. First, the CAN bus is initialized. If not, the fault diagnosis is performed and the error message is printed to the user.
The transmitting subroutine first packs the data to be sent into a frame format conforming to the CAN protocol, writes it to the buffer area, and finally sends it out. The data portion of the packet can vary from 1 byte to 8 bytes. You must first check if the last time you have sent it before sending it.
ConclusionThe ship cabin intelligent monitoring system is a powerful monitoring network, which successfully solves a series of problems such as data transmission bottleneck, data conflict and data synchronization in the monitoring system. It has good real-time and stability, simple structure and high integration. Easy to expand and easy to operate. The monitoring system based on this method is an important development direction of the ship intelligent monitoring system.
DB25 Female Connector, DB25 Male Connector,DB9 Male Connector,DB9 Female Connector,DB9 Right Angle Backshell,Molded D-Sub Cables
The On-site injection molding enables us to custom mold your D-Sub assemblies to your specs with logos. We are tooled for:
DB9 molded cables,,DB25 molded cables, DB50 molded cables, HD15 molded cables
DB Backshell or Boot-Kit Cables: The backshell cans and boot-kits are available for D-Sub DB15 cablesD-Sub DB37 cables.
Backshells are offered for: D-Sub high-density HD26, HD44, HD62, HD78
D-sub cable, DB cable, 9pin DB cable, molded DB connector, Data Cable
ETOP WIREHARNESS LIMITED , https://www.wireharnessetop.com