introduction
With the rapid development of wireless communication, the combination of wireless network and RFID technology related to indoor positioning has also attracted more and more attention. People's demand for the location of goods and personnel is also increasing. Outdoor positioning, such as the well-known GPS positioning, has achieved a degree of satisfaction for many people, but once inside, due to the obstruction of buildings and multipath effects, the effect of GPS positioning indoors is greatly reduced, so indoor positioning Research has become the focus of subsequent research. There is a wide range when you need to locate people and items in your company. The distance of traditional label positioning is flawed, which limits its wide application. So Yi proposed the combination of RFID technology and wireless network to expand the scope of its positioning.
Wireless WiFi has a high data transmission speed in a free 2.4GHz band. So choose the location tag based on WiFi network communication. WiFi network has the following advantages: WiFi's working frequency band is 2.4GHz, and it is in a free frequency band. There is no additional cost for users; WiFi transmission distance can reach 100m, which can cover the entire building; WiFi transmission rate is very high, Achieve 54 Mbps. The accuracy that affects positioning is not only about the choice of positioning technology, but also the choice of positioning algorithm will affect its positioning accuracy. Common indoor positioning algorithms are mainly divided into two categories: positioning algorithms based on ranging technology and distance-independent algorithms. Algorithms based on ranging technology generally calculate the position of unknown nodes through the distance or angle between the nodes. The common ones in practice are: based on received signal strength indication algorithm (RSSI), angle of arrival algorithm (AOA), and time of arrival Algorithm (TOA) etc. Distance-independent algorithms are: centroid method, APIT algorithm, convex programming algorithm, etc. These algorithms use the proximity relationship between nodes to achieve positioning.
In general, algorithms based on ranging technology have higher accuracy than those without ranging. This paper uses RFID technology based on wireless network, and on this basis, an algorithm is proposed to realize a positioning system with small error range.
1 The hardware structure of the system
Radio Frequency Identification (Radio Frequency IdenTIficaTIon, RFID) is commonly known as electronic tags. RFID is a non-contact automatic identification technology. It automatically identifies target objects and obtains relevant data through radio frequency signals. The identification work does not require human intervention and can work in various harsh environments. RFID technology can identify high-speed moving objects and can recognize multiple tags at the same time, and the operation is quick and convenient. RFID is a simple wireless system with only two basic devices. The system is used to control, detect and track objects. The system consists of an interrogator (or reader) and many transponders (or tags).
The hardware of the positioning system includes: reader, electronic tag and wireless WiFi module.
The reader is a device for reading / writing tag information.
Electronic tags are divided into active and passive types. Active technology electronic tags have batteries inside, and their lifespan is generally longer than passive ones. Send information through the set frequency band until the battery is replaced. The active technology electronic tags used in this article have a long life.
The wireless WiFi module is mainly used for communication between electronic tags, readers and APs (used to receive tags' transmitted signals).
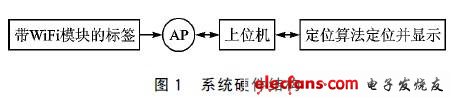
RFID positioning can be used for warehouse management, company personnel, goods and accurate positioning of hospital patients. However, because the distance limits its development, the combination of wireless WiFi technology and RFID technology further improves the positioning range and accuracy. The system hardware structure is shown in Figure 1.
2 System software and positioning algorithm
2.1 Based on signal strength algorithm
Traditional signal propagation is easily affected by refraction, reflection, diffraction, diffraction, etc. The received signal strength is the superposition of signals propagated by various channels. So sometimes the signal strength increases and sometimes it decreases. After a lot of practice, it is found that the received signal strength follows the log-normal distribution. The distance between nodes is estimated by the attenuation of the signal during propagation, and the signal field strength at the position to be received is solved according to the channel model:
![]()
Where: n is the path loss index, which is related to the surrounding environment; Xσ is a normal random variable with a standard deviation of σ; d0 is the reference distance, usually 1 m in an indoor environment; PL (d0) is the signal at the reference position strength.
Assuming that there are n APs and m reference tags, the intensity of the pending tag received by the AP point P = (AP1, AP2, ..., APn), and the intensity vector of the collected tth reference tag is St = (St1 , St2, ..., Stn), the Euclidean distance between the pending label and the reference label St is:

The representative based on the signal strength algorithm is the LANDMARC algorithm. The algorithm mainly finds the reference label closest to the pending label position by comparing different Et. When a label to be measured is determined by K neighboring reference labels, we call it "K-nearest neighbor algorithm", and the coordinates of the label to be determined are (x, y):
Among them, Wi and (xi, yi) are the weighting factor and coordinate position of the i-th neighbor reference label, respectively. Based on experience:

The larger the weight, the smaller the E value. Although the LANDMARC grate method can handle more complex environments, multipath effects may occur in some enclosed environments, resulting in low positioning accuracy. Another researcher proposed improvements to the LANDM ARC algorithm: add the RSSI values ​​of the tags harvested in different readers to a set, and then find the most frequent tag in the set as the closest distance tag, and then use the empirical formula Find the coordinate position of the label to be measured. This can obtain more accurate accuracy.
2.2 Trilateral positioning algorithm
Three-sided positioning method: take the three APs with known positions as the center of the circle, and use the distance from the closest reference label to the label to be measured as the radius. The intersection of the three circles obtained is D. The triangular algorithm is shown in Figure 2.
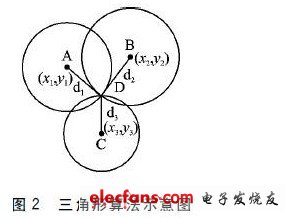
Suppose the position node D (x, y), the coordinates of the three points A, B, and C are known as (x1, y1), (x2, y2), (x3, y3). Their distances to D are d1, d2, and d3, respectively. Then the position of D can be solved by any two of the following equations.
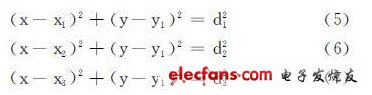
But in practical applications, due to the existence of measurement errors, it is difficult for three circles to intersect at one point. And this is a common thing, which will cause the equation to have no solution and cannot locate the target to be measured.
2.3 The algorithm used in this article
In this scheme, the positioning algorithm we use is based on the received signal strength (that is, the LANDMARC algorithm), and uses the trilateration algorithm behind the LANDMARC algorithm to make it more accurate.
Before the experiment, place an electronic label (reference label) every 3 m in the aisle and three rooms of a company building, and place an AP in each of the southeast and north corners of the floor. Do a good job on the wireless of the upper computer and the lower computer Communication (connection of software program server and client).
When the experiment was carried out, when the tag under test entered the range of AP (4), it began to receive the field strength of the signal from the tag under test and passed it to the host computer. At the same time, it also receives the signal field strength of each reference tag at each AP and passes it to the host computer.
The positioning algorithm establishes the field strength of the label under test on the four APs (AP1, AP2, AP3, AP4) into a field strength vector, and the reference label also establishes the field strength vector. Through the LANDMARC algorithm, that is, by comparing the Euclidean distance between the field strength vector of the label under test and the field strength vector of the reference label, three reference labels with the smallest Euclidean distance are found, and the specific positions of the three reference labels are obtained The reference label is already recorded). For the 3 reference points, it is no longer necessary to determine the radius according to the strength of the signal, but the 3 reference points are used as the center of the circle, and the distance between the closest reference labels (to determine the placement of a reference label every few meters) is 3/4 Make 3 circles with the length as the radius, so that the possibility of the 3 circles intersecting each other will increase.
Since 3 circles are difficult to intersect at the same point, there are 3 kinds of relationships between 3 circles: â—† 3 circles intersect each other in two pairs, and 3 circles have a common area; â—† 3 nets intersect each other in twos, but There is no common area; â—† 3 circles do not intersect.
The specific relationship is as follows: â‘ When 3 circles have a common area, then there must be 3 intersection points in the common area, and use the 3 intersection points as the triangle, then the coordinates of the label to be measured are the inner coordinates of the triangle.
â‘¡When there is no common area between each other, there must be two common areas. Take the midpoint of the line connecting the two intersections of the area where the two circles intersect, and then use these three midpoints to make a triangle. The inner center is the inner coordinate of the label to be measured.
â‘¢ Discard if the 3 circles do not intersect, and accept the next 3 reference labels of the next group. If the intersection has not been found 3 times, use the position made by the 3 reference labels to make a triangle.
The advantage of this algorithm is that in the positioning accuracy of the original LANDMARC algorithm, triangle positioning is performed to further improve the positioning accuracy. At the same time, further triangular positioning based on the distance between the reference tags can reduce additional calculations and can reduce repeated measurements due to changes in the field strength of the reference tags.
Conclusion
This article mainly discusses the algorithm based on signal strength and the trilateral algorithm based on non-ranging, and further improves the LANDMARC algorithm. It is concluded from the relevant experimental results that the algorithm can achieve an error of about 1.5 m in positioning accuracy, and the scheme is suitable for wide application.
Bldc Motor,Brushless Dc Motor,Bldc Hub Motor,Brushless Dc Fan
Wentelon Micro-Motor Co.,Ltd. , https://www.wentelon.com