First, the design ideas
The field detection vehicle based on AVR microcontroller generally includes three parts: mechanical part, electronic part and software part. Subdivided into car body base module, main motion module, auxiliary motion module, power module, main processing module, motion control module, video acquisition module, sensor acquisition module, wireless communication module, host computer module.
Second, the program design
1 car body base module
The car body base module is the hardware support of the robot, which fixes most of the components of the robot, including the bracket and the mount, and is riveted by aluminum alloy. The aluminum alloy has good rigidity and can withstand large loads, which is easy to process and has good quality.
2 power supply module
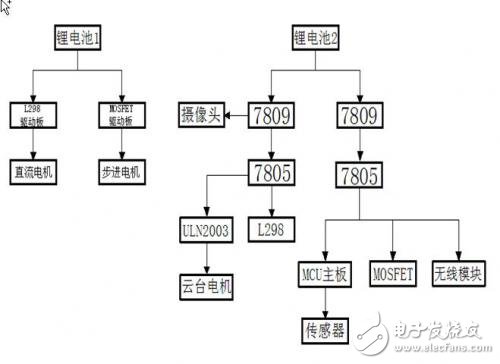
3 main processing module
The MCU is the EVK1100, which implements data processing, sensor data acquisition, motor control and wireless module coordination.
After receiving the data of the sensor, the data is sent to the wireless module through the serial port, and the control signal transmitted by the serial port is accepted. After the processing, the response is performed, and the motion control module is controlled to complete the corresponding action.
4 sensor acquisition module
The sensor module can be equipped with relevant types of sensors as needed. GPS Navigator can be mounted for precise positioning on a global scale. Life Detectors can also be mounted for more efficient search and rescue activities. Gyros can also be mounted to help adjust the robot's posture and successfully complete obstacle-obstacle tasks.
5 sensor acquisition module
The robot carries a temperature sensor and a gas sensor, a video capture module, including a wireless camera, a receiver, and a video capture card.
6 wireless communication module
The wireless communication module uses a high-precision, high-sensitivity PTR6000 wireless communication module. The module uses a full-duplex mode of operation with a transmission distance of up to 500m. One end is connected to the upper computer and one end is connected to the robot.
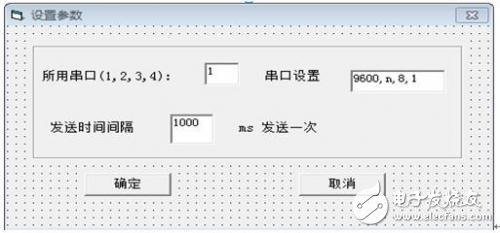
7 upper computer module
The host computer interface is an application program. The program is written by Microsoft Visual Basic 6.0 and is mainly used for data reception and display and control signal transmission. The serial communication uses Microsoft's MSCoom control, and the baud rate setting window is as follows.
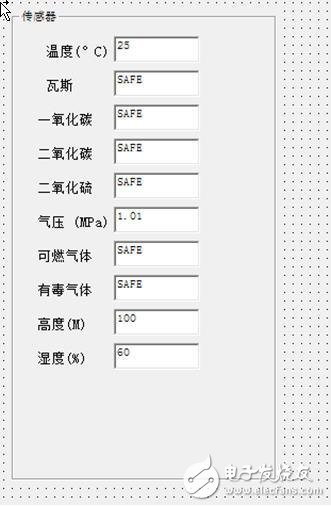
The video sound display part uses StkATVAP, which can display the video sound signal collected by the wireless camera and can capture and save. The sensor data shows that the sensor signal sent by the lower computer, as described in the sensor section, can also be increased or decreased as needed.
Third, the main innovation points
1 Adopt full-duplex wireless communication technology.
2 The host computer program is powerful and the man-machine interface is friendly.
3 You can choose wireless or wired control depending on the situation.
4 Load the wireless camera to return video and sound signals, and the video signal can be captured and stored.
Gasoline Generator,Fule Tank Generator Set,Silent Trailer Diesel Generator,Small Diesel Power Generator
XCMG E-Commerce Inc. , https://www.xcmg-generator.com